Quick Introduction
I recently started this project to make something for and with my 8 year old. It’s inspired by an old homework assignment from the 90s. The idea is that it’s a turn based, strategic racing game. On your turn, you will by default move your previous speed forward. You can nudge your speed up or down, but only to a limited extent, and you can rotate left or right 60°. Hit a wall and you’ll loose a turn and start over from 0 speed, so you need to walk a line between fast and agile.

I’m currently doing it in Unity, using pure C# for most of my business logic. As with everything involving hexagons in the past decade, a huge amount of thanks is owed to Red Blob Games’ page on Hexagonal Grids. Art was done in a mix of Blender and Asset Forge.
Planned Scope
In addition to the basic mechanics described above (which are pulled wholesale from that homework assignment) I want to include additional vehicle differentiation, so I’m eyeing several different vehicle traits. At the moment I have a loose constellation of:
- Max speed
- Max safe turn speed (trying to turn when moving above this speed will cause a rollover)
- Acceleration profile? (e.g., maybe a car with a slow start requires two turns to go from 0 to 1, so you need to strongly prioritize not crashing)
- Momentum (determines speed loss from driving through obstacles like crates and water barrels)
- Offroad Speed (how fast you can go on “shortcut” roads)
One thing I want to specifically avoid is Mariokart style front-facing weapons and catch up mechanics (the latter don’t even make sense with this movement model). My solution at present is to pepper the course—especially straightaways—with one-shot obstacles that slow down anyone driving through them. So if a player has a wide lead, they either need to use extra turns juking to dodge obstacles or else slow down by traveling through them (and at the same time clearing the path for players behind them).
I’m also planning on lumping several (probably 4) courses into a single “game” with a point total determining the overall winner, and “reward” the winner of each individual race with a random cumulative penalty from the Wheel! Of! Penalties!
Proc Gen
The current courses are procedurally generated, but a top-down view of them makes the algorithm fairly clear:
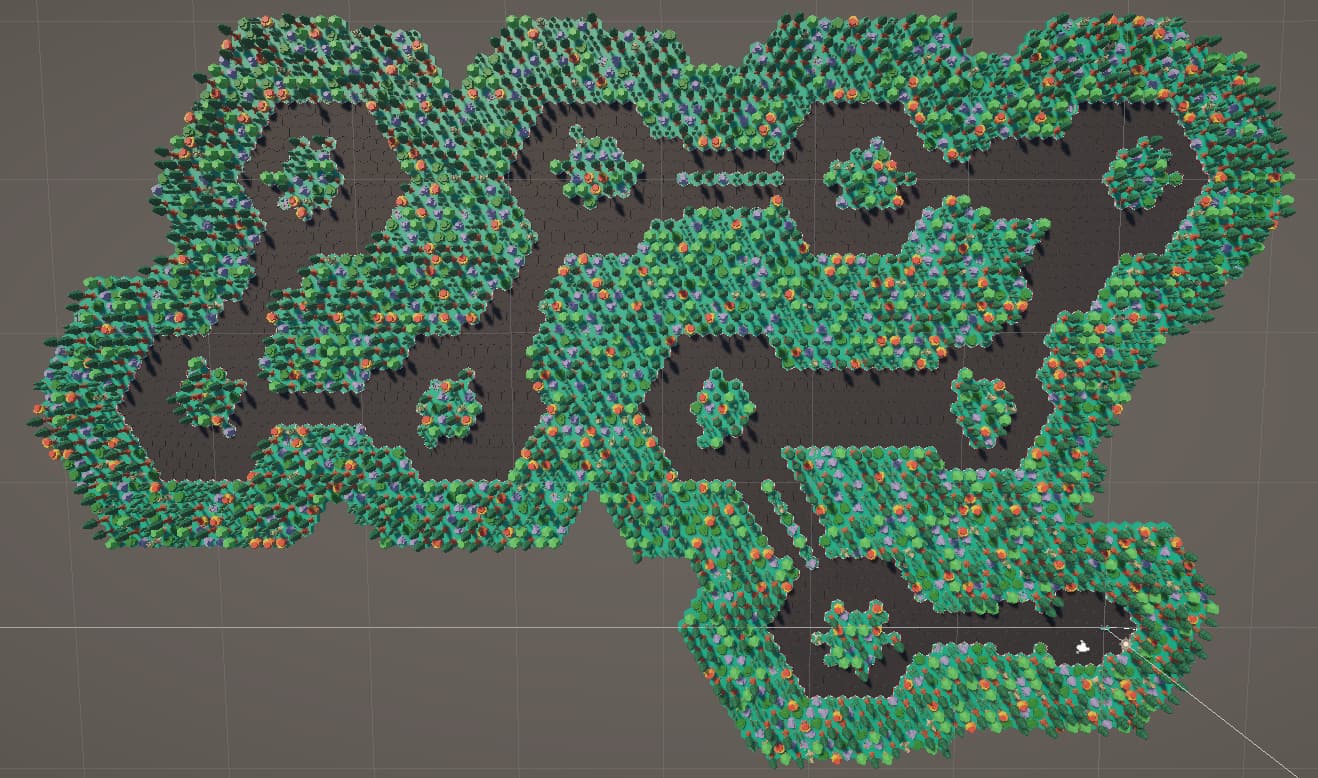
I perform a random walk on a simple hex grid, and then explode each vertex of the path out into a hexagonal pool of road on a larger map. Paths of varying width connect the vertices, and then some paths get a “median” added, and I quasi-randomly look for big areas of open space that I can interrupt with islands of forest.
Long term I plan to combine this approach with some Bézier curve pathing as well as another few layers of post-processing to add obstacles, (limited) short cuts, and some dynamic obstacles like areas where boulders randomly roll across the road.
Next Steps
The immediate next step is implementing the full turn programming framework. Right now you can “free drive” a car around using the arrow keys and instantaneous car movement, but I want to move to the speed-based movement with animated transitions (probably also Bézier curves).